
Останавливаем вращение Юпитера.
Вращение Юпитера - это проблема. Всем хорошо известно, что планеты вращаются вокруг своей оси. Именно этот фактор накладывает ограничение на съемку планет, а именно существует некоторый временной предел, дольше которого снимать нельзя, иначе изображение размажется вращением. Для Юпитера эти ограничения наиболее существенные ввиду быстрого вращения, большого видимого углового размера планеты и тонкой детализации. Для апертуры 230мм теоретические расчеты дают только пол-минуты времени на съемку, однако на практике это время можно увеличить в разы и по нашим оценкам вполне приемлемым пределом являются примерно 2.5-3 минуты съемки (при исключительно спокойной атмосфере это время можно слегка уменьшить). Что есть 3 минуты съемки? При наиболее распространенной скорости съемки современных камер 30 кадров в секунду это 5400 кадров на видеоролик. Ситуация резко усложняется для обладателей монохромных камер. С учетом необходимости съемки трех видео с красным, зеленым и синим фильтрами общее количество кадров съемочной сессии делится на три и в результате мы можем снимать только по 1800 кадров на каждый канал. Это совсем немного, т.к. в сложение необходимо брать порядка 1000 кадров, т.е. получается больше половины. Однако наша атмосфера почти никогда не дает нам такой возможности и наиболее распространенный случай, когда только около 10% кадров видеоролика являются четкими и годными для сложения. Эта причина на первый взгляд парадокса, когда изображения Юпитера, снятые на цветные камеры, априори уступающие по ТТХ монохромным, зачастую оказываются лучше. Кроме всего прочего, если при съемке на монохром одного из трех каналов атмосфера ухудшилась, к сожалению всю съемку придется выбросить в мусорку. В этой статье пойдет речь о том, как эту проблему решить. Изложенная здесь информация будет наиболее интересна в первую очередь обладателям именно монохромных камер, хотя кое-что может быть использовано и по отношению к съемке с помощью цветной камеры.
Общая идея улучшения снимков состоит в увеличении отношения сигнал/шум. Если мы не можем это сделать аппаратно - не хватает денег на телескоп с большой апертурой, который бы собирал много света, и у нас нет сверхчувствительной супер-камеры, позволяющей снимать при 100fps, мы должны искать способ сложения в стек большего количества кадров. Но где эти кадры взять, если мы жестко ограничены по времени съемки? Оказывается выход есть и суть состоит в съемке максимально длинных до 2.5-3 минут роликов на канал с последующим сложением трех R, G и B изображений в цветное с поворотом планеты, т.е. с приведением каждого изображения к единому моменту времени и одинаковому значению центрального меридиана. С практической точки зрения это даст нам возможность снимать по 5400 кадров на канал и 16200 кадров в сумме (при 30fps) на конечное цветное изображение. Это серьезно улучшает возможности монохромной съемки со светофильтрами перед цветной матрицей. Самое удивительное заключается в том, что существует астрономическая программа, которая способна нам в этом помочь. И мне крайне удивительно, что никто из любителей астрономии как у нас, так и за рубежом никогда этим не пользовался, по-крайней мере я об этом ничего не слышал. Имя этой программы - WinJUPOS. Не буду больше теоретизировать, а лучше покажу на конкретном примере, как же это делается...
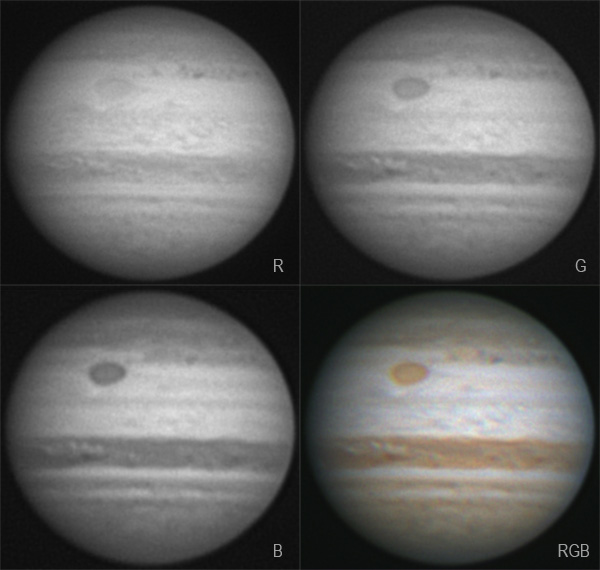
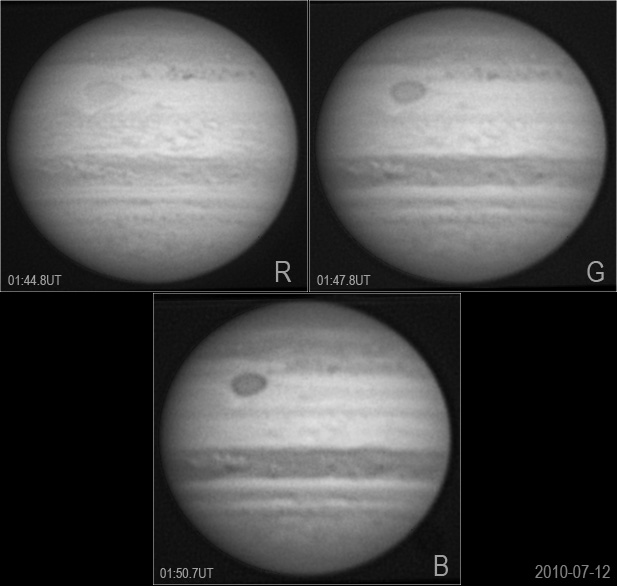
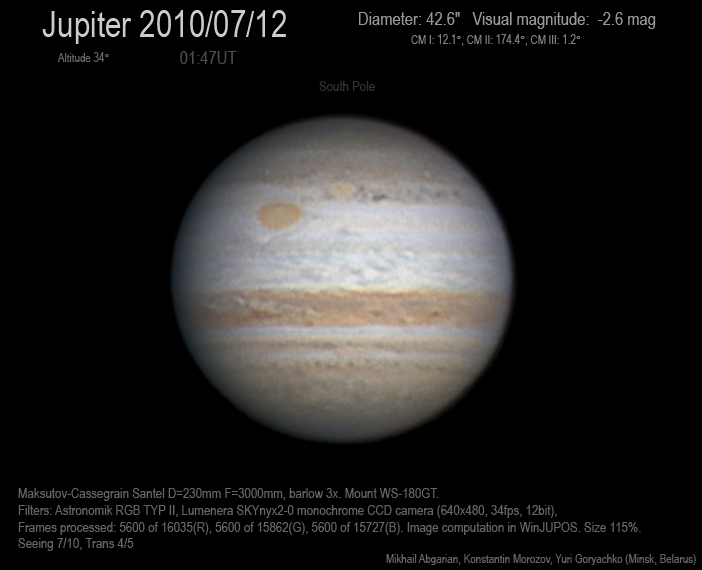
Итак, утром 12 июля 2010 года в телескоп Сантел-230 на монохромную камеру Lumenera 2-0M были сняты (спасибо М. Абгаряну) три видеоролика с красным, зеленым и синим светофильтрами продолжительностью по 2.5 минуты каждый. На обработке исходного видоматериала я не буду подробно останавливаться, т.к. это тема отдельной статьи. Лишь замечу, что при выравнивании в Регистаксе является крайне желательным устанавливать бокс для выравнивания не снаружи Юпитера, а внутри - это возможно, если атмосфера более-менее устойчивая и детали на одиночных кадрах видны относительно постоянно. При таком способе бокс следует за деталями на поверхности и это позволяет дополнительно уменьшить смаз от вращения вблизи центрального меридиана, а ведь именно там он заметен в наибольшей степени... Таким образом, обработка отснятого материала привела к трем стекам, обработанным фильтрами резкости (вейвлеты, деконволюция), классическое сложение которых в цветное изображение невозможно из-за поворота Юпитера (рис.1, здесь и далее приводятся картинки в 75% размере от рабочего) - на нижнем правом изображении мы видим, что цвета "разъехались".
рис.1 Причина этого - вращение Юпитера, которое хорошо видно на анимации каналов (рис.2):
рис.2 Наша задача состоит в том, чтобы правильно сложить R, G, B каналы в цветное изображение с "компенсацией поворота" Юпитера. Перехожу непосредственно к программе WinJUPOS, которая и послужит нам тем самым стоп-краном, останавливающим вращение Юпитера. Программа работает через цилиндрические преобразования, однако не стоит этого пугаться - нам не придется напрямую работать с цилиндрическими проекциями (если мы этого не хотим), программа сделает все сама, нам лишь нужно пройти определенную последовательность действий.
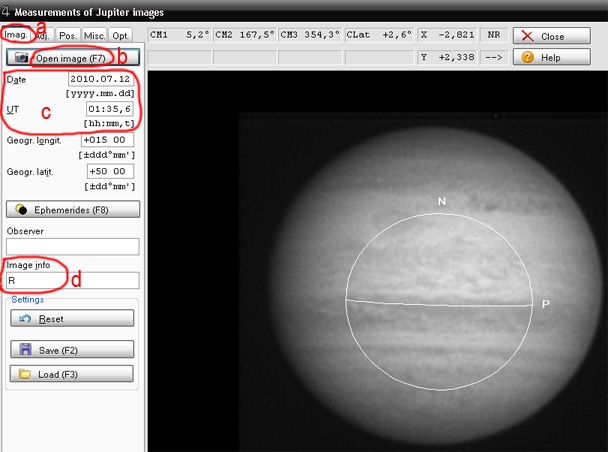
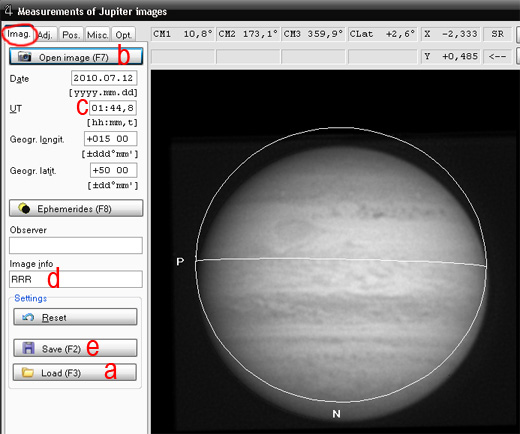
Измерение изображений в WinJUPOS. Первым делом в Program/Celestial body необходимо выбрать Jupiter, т.к. в данном случае мы работаем именно с ним. Затем в Program/Preferences нужно указать расположение рабочей директории (Data directory) с нашими изображениями, чтобы программа сразу открывала необходимую нам папку. Теперь мы можем приступать к калибровке наших изображений. В меню Recording выбираем Image measurement. В появившемся окне, находясь в первой закладке Imag. (рис3a), открываем наш красный канал, нажав Open image (рис.3b), указываем точную дату и всемирное время съемки на середину ролика (рис.3c). Для правильной работы в WinJUPOS на точную регистрацию моментов начала и конца съемки, из которых потом высчитывается время на середину ролика, придется обратить особое внимание - теперь это важная информация. Долготу и широту пункта наблюдений (Geogr. longit. и Geogr. latit.) можно вписать разве что для собственного успокоения, т.к. на конечный результат это никак не влияет. В поле Image info (рис.3d) впишем "R", что означает, что мы калибруем красный канал - так нам будет потом легче разбираться с файлами измерений. В принципе, вписать можно все что угодно - эта информация будет добавлена в имя файла измерения.
рис.3
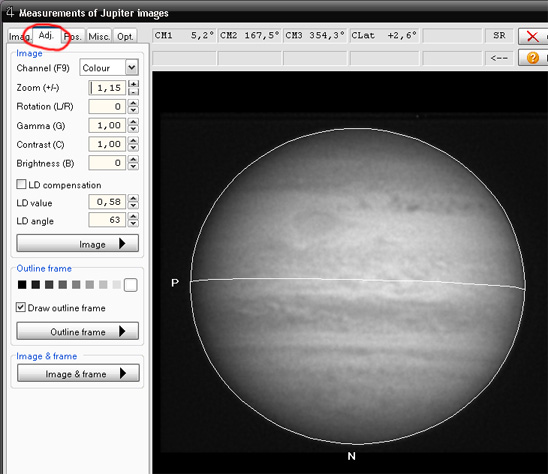
Переходим теперь ко второй закладке Adj. (рис.4). Наша задача состоит в том, чтобы точно установить положение измерительного круга соответственно лимбу и экватору планеты. Набор клавиатурных команд здесь следующий: Плюс, минус - изменяют масштаб нашего изображения для удобства измерений. Стрелки на клавиатуре – двигают измерительный круг по осям x , y . Page Up – увеличивает диаметр круга. Page Down – уменьшает диаметр круга. N – вращает круг по часовой стрелке. P – вращает круг против часовой стрелки. Backspase (стрелка назад над клавишей Enter) – меняет положение севера (N) на 180 градусов. Для Юпитера в WinJUPOS есть волшебная кнопка F11, нажатие которой приспосабливает измерительный круг автоматически, нужно только изначально примерно установить положение севера ("N" на измерительном круге) относительно нашего изображения клавишей "Backspace". Правда частенько после автоматической работы программы все же приходится чуть подкорректировать круг с помощью клавиатурных команд. Правильно сделанное измерение показано на рис.4:
рис.4
После этого возвращаемся обратно в закладку Imag. и сохраняем результат измерений в файл с расширением *.ims , нажав кнопку Save внизу слева. В данном конкретном случае программа сгенерировала файл 2010-07-12-0135.6-R.ims . Видим, что в названии файла присутствуют дата и время съемки (UT), а также префикс "R" - информация, которую мы добавили для удобства последующей работы. Все то же самое мы должны проделать и с остальными изображениями (G и B) и получить три файла измерений. Если при съемке камера не вынималась для смены фильтров (сохранялось одинаковое положение в течение всей съемки), фильтры парфокальны, фокус не перенаводился, а оси экваториальной монтировки были выставлены точно (вращение поля отсутствует), я рекомендую не менять диаметр измерительного круга и поворот по углу для следующих измерений (при открытии следующей картинки положение круга сохраняется от предыдущего измерения), а только корректировать его положение по осям x, y (стрелками клавиатуры вправо-влево и вверх-вниз). Это избавит нас от внесения дополнительных ошибок в измерения. Хочу также отметить две вещи. Первая - для измерений не важно, каков изначальный масштаб изображений и как ориентирована планета на снимке. Фактически, для сведения в одно цветное изображение мы можем использовать снимки, полученные на разных телескопах и с разными увеличениями. Исходя из сделанных измерений и заданных моментов времени съемки, программа (учитывая эфемериды) сама правильно сориентирут разные изображения. И второе, если на нашем снимке рядом с Юпитером присутствует спутник, это сильно облегчит наши измерения. Программа показывает положение спутника кружочком и если мы указали правильное время съемки, будет очень легко совместить измерительный круг с лимбом Юпитера, а кружочек с изображением спутника. И еще, измерения нужно проводить тщательно и аккуратно, от этого зависит точность совмещения каналов впоследствии. Хотя подкорректировать и уточнить измерения можно и потом - я об этом еще расскажу. Видеоурок 1: "Измерение изображений в WinJUPOS" (EXE, 3.4MB).
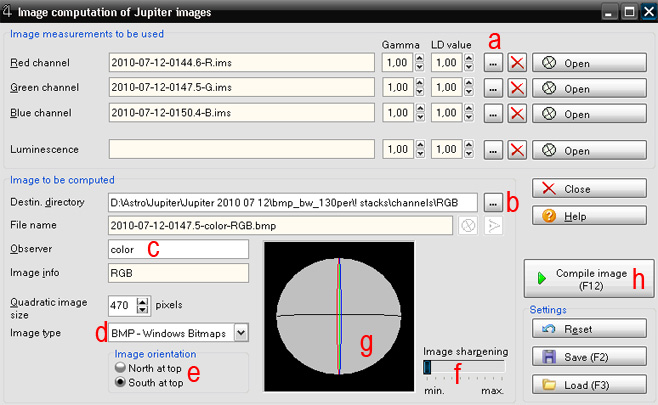
Сборка цветного изображения в WinJUPOS. Дальше все очень просто. В меню Tools жмем Image computation.
рис.5 В появившемся окне выбираем правильные соответствия *.ims файлов для каналов R, G, B (рис.5a). Указываем путь для сохранения будущего изображения (рис.5b). Если нужно, вписываем любую нужную информацию в поле Observer (рис.5c) - она будет добавлена в имя файла. Выбираем формат файла BMP (рис.5d) (к сожалению, на выходе программа отдает только 8-битный формат). (Добавлено: Начиная с версии программы 9.1.0 появилась возможность сохранять изображения в 16-битном формате). Определяем ориентацию - вверху север или юг (рис.5e). Image sharpening (рис.5f) я обычно ставлю в минимум. Картинка (рис.5g) показывает, насколько будет повернут каждый канал. После этого остается только нажать кнопку Compile image (рис.5h) и получить через несколько секунд готовое цветное изображение:
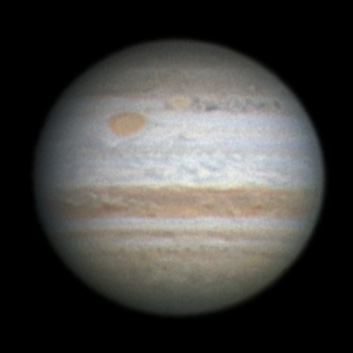
рис.6 В полученном изображении каналы сведены точно и с компенсацией вращения на средний момент времени (прописывается в имени файла) для всех трех каналов. Цветового смаза, как на рис.1 мы уже не наблюдаем. Хочу заметить, что на сложенных в WinJUPOS изображениях экватор планеты всегда расположен горизонтально. Видеоурок 2: "Сборка цветного изображения в WinJUPOS" (EXE, 2.7MB). Конечно, данное изображение требует дальнейшей постобработки. Коротко упомяну об артефактах, которые могут возникнуть при сложении в WinJUPOS и о том, как их решить. Проблема первая. При сложении с поворотом левый и правый края диска приобретают красную и синюю окантовку (это происходит из-за недостатка информации в этих местах изображения - данные зоны просто не были отсняты). Проблема решается в цветовом пространстве Lab созданием копии слоя и гауссовым размытием с большим радиусом (порядка 10-20 пикселей) в этом слое каналов a, b. Данный слой заливается черной маской (т.е. полностью скрывается), после чего белой кистью из него берутся только самые края вблизи лимба. Проблема вторая. Светлая или темная окантовка (или ее часть, точки и т.п.) левого и правого лимба. Проблема решается в цветовом пространстве RGB с помощью гауссового размытия с малым радиусом (порядка 1-3 пикселей) копии слоя. Данный слой скрывается черной маской, после чего белой кистью из него берется только линия лимба. Я подготовил небольшой видеоурок на эту тему и для лучшей иллюстрации, чтобы подчеркнуть артефакты, в качестве примера взял изображение, собранное из красного, зеленого и синего каналов, взятых из разных RGB-серий, снятых примерно с 12-минутными интервалами. Видеоурок 3: "Устранение краевых артефактов в Фотошопе" (EXE, 7.5MB). Ниже вы можете видеть мой вариант постобработки полученного цветного изображения:
рис.7
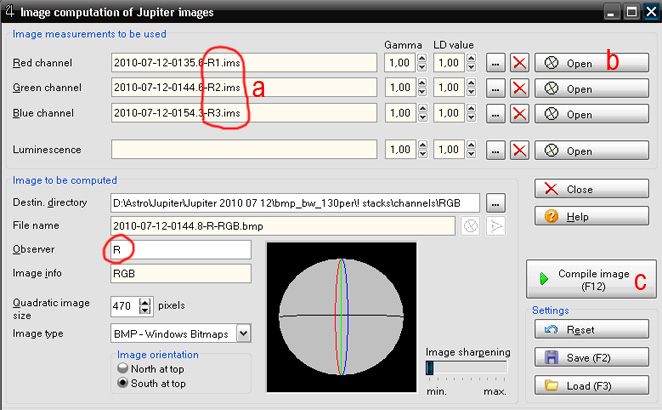
Описанную выше методику можно назвать 1х3, т.е. в обработку пошла одна съемочная сессия из 3-х видеороликов, снятых с красным, зеленым и синим фильтрами. Размышляя о том, как можно улучшить отношение сигнал/шум дополнительно, мне пришла в голову идея использовать три съемочных сессии. Теперь признаюсь, что на самом деле 12 июля 2010 года съемка велась именно по схеме 3х3. Суть в следующем. Подряд снимаются девять видеороликов по 2,5-3 мин. каждый в следующей последовательности: R1, G1, B1, R2, G2, B2, R3, G3, B3 Затем видеоролики складываются и все обработанные и подтянутые стеки калибруются точно также, как описано выше в разделе "Измерение изображений". Только, чтобы потом не запутаться, в поле Image info (рис.3d) для каждого стека записывается соответственно R1, G1, B1, R2, G2 и т.д.. После этого с помощью Image computation (рис.5) складываются сначала все красные каналы (R1, R2, R3), затем зеленые (G1, G2, G3) и в наконец синие каналы (B1, B2, B3). Для каждого сложения в поле Observer (рис.5с) желательно прописать соответственно R, G, B соответственно, опять же для того, чтобы не запутаться - эта информация добавляется в имя файла. В результате мы получим три почти серых на вид RGB-изображения с коррекцией вращения, в каждом из которых будут находиться - в одном все наши красные стеки, во втором - все зеленые и в третьем - все синие. Моменты времени, к которым были приведены полученные изображения, указаны в имени файла - это значения нам еще понадобятся. Теперь, на примере красного изображения я объясню, что с этим нужно сделать. Откроем в Фотошопе изображение, собранное в WinJUPOS из красных каналов. Зайдем в закладку Каналы и посмотрим, что находится в каждом из них (рис.8). Я надеюсь, при прочтении статьи у вас в голове не возникнет путаницы от того, что говоря например о красном канале, я иногда имею в виду изображение, снятое с красным фильтром, а иногда канал RGB-изображения. В данном случае и красный, и зеленый, и синий каналы RGB-изображения содержат результаты съемки с красным фильтром.
рис.8 Первым делом необходимо решить, хорошо ли совпадают детали на трех изображениях, полученных с красным фильтром, друг с другом. Если присутствуют весьма заметные сдвиги, повороты, вращения, значит стадия калибровки изображений была проведена с ошибками. Это легко подправить. Допустим, изображение, в красном канале (R1), неточно совпадает с остальными. Значит необходимо внести поправки в измерение для этого изображения. В WinJUPOS в инструменте Image computation (смотрим, чтобы все соответствия *.ims файлов были правильные, рис.9a) жмем кнопку (рис.9b), соответствующую красному каналу. При этом откроется интрумент Image measurement для данного изображения (рис.3). Зайдем в закладку Adj. (рис.4) и изменим соответствующим образом положение измерительного круга. Я не буду объяснять, куда и как его двигать - после небольшой практики это становится интуитивно понятно. Затем вернемся в закладку Imag. (рис.3a) и пересохраним *.ims файл. Закроем Image measurement, а в Image computation заново просчитаем (рис.9c) изображение из трех красных каналов, один из которых мы подправили.
рис.9 Снова открываем в Фотошопе полученное изображение и проверяем, хорошо ли совпадают детали в разных каналах. Если нас все устраивает, переходим к чистовой сборке красного канала (суммированию трех изображений в одно). Щелкая по каналам полученного BMP-файла (рис.8), можно заметить, что в то время, как картинка в зеленом канале лишена артефактов на лимбе, синий и красный канал имеют неприятные контуры вдоль лимба. Как уже говорилось, это связано с отсутствием информации о деталях в данных изображениях после программного поворота Юпитера. Я эту проблему решаю в Фотошопе следующим образом. Создается новый документ (16бит), в который вставляются наши каналы - зеленый (R2) нижним слоем, а над ним красный (R1) синий (R3). К синему и красному создаются маски и с помощью черной кисти (нажим 100%, жесткость 0%) по маске из каждого из них исключаются артефактные зоны. Для равновесного сложения трех изображений Непрозрачность каналов необходимо выставить исходя из правила 100% разделить на n, где n - номер слоя. Т.е. первый слой - 100%, второй - 50%, третий - 33%. Если по атмосферным причинам одно из изображений получилось лучше других, его вес можно увеличить смещением величин Непрозрачности слоев в пользу наилучшего изображения. К полученному бутерброду из трех слоев я обычно добавляю High Pass фильтр, однако по маске исключаю его действие для прилимбовых зон, т.к. шум там растет быстрее (в прилимбовых зонах сложено фактически не три, а два изображения)... Про сборку чистового суммированного изображения я подготовил видеоурок на примере изображений, снятых с красным фильтром. Видеоурок 4: "Сборка чистового красного канала в Фотошопе" (EXE, 3.7MB). Подобная процедура также проводится и с зелеными и с синими изображениями. В результате, мы должны получить три чистовых R, G, B изображения (рис.10) для дальнейшей работы. Новые моменты времени, которые соответствуют данным изображениям (каждое сложено из трех исправленных по вращению), я взял из названий bmp-файлов, сохраненных после стадии Image computation в WinJUPOS.
рис.10 Теперь остается сложить полученные каналы в цветное изображение опять же с помощью WinJUPOS. Для этого их нужно откалибровать инструментом Image measurement - почти все то же самое, что мы уже делали. Я рекомендую использовать тот же диаметр измерительного круга, что и для исходных изображений - его можно загрузить, открыв любой из уже имеющихся *.ims файлов кнопкой Load (рис.11a) в закладке Imag.. Затем открываем изображение чистового красного канала (рис.11b), сложенного из трех индивидуальных, вписываем дату и время (берем из имени bmp-файлов) (рис.11c). В поле Image info (рис.11d) я добавляю "RRR", что означает, что мы измеряем красное изображение, сложенное из трех индивидуальных.
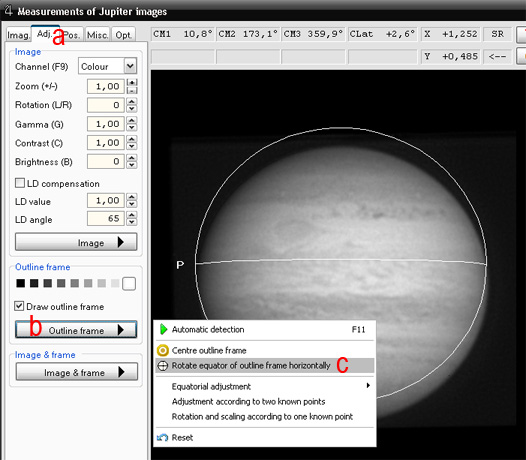
рис.11 Переходим в закладку Adj. (рис.12a). И теперь важный момент! Поскольку после предыдущего сложения в WinJUPOS линия экватора на нашем изображении расположена уже горизонтально (в отличие от исходных снимков), нужно обнулить угол поворота измерительного круга. Для этого жмем кнопку Outline frame (рис.12b) и выпавшем меню выбираем Rotate equator of outline frame horizontally (рис.12c).
рис.12 После этого подгоняем точное положение измерительного круга с помощью стрелок клавиатуры под наше изображение. Затем возвращаемся в закладку Imag. и сохраняем результат измерений (рис.11e)... Все то же самое повторяем для зеленого (GGG) и синего (BBB) каналов. Единственное, что можно добавить, двигать измерительный круг больше не нужно, т.к. его положение сохранилось от предыдущего измерения красного канала, а все три R, G, B изображения строго совпадают по положению после предыдущего сложения в WinJUPOS - программа выдает планету строго в центре картинки. Т.е. для зеленого и синего каналов необходимо только вписать время, префикс (GGG и BBB соответственно) и сохранить результат измерений. Последним этапом выполняем сложение с помощью Image computation (рис.5), только берем *.ims файлы с префиксами RRR, GGG, BBB соответственно. Вот результат, который получился у меня после последней стадии в WinJUPOS:
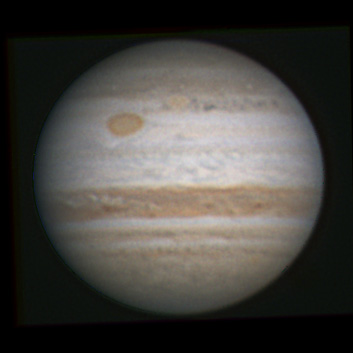
рис.13 Исходя из собственного опыта, я могу сказать, что изображения, полученные по методике 3х3, выглядят более гладкими и детальными, менее шумными и более приятными на вид, чем изображения по методике 1х3. Проблемы с артефактами левого и правого лимба, если они возникают, решаются точно так же, как было описано в разделе "Сборка цветного изображения". Конечно, данное изображение требует дополнительной постобработки... Наш финальный вариант, сделанный по методике 3х3, в полном размере выглядит следующим образом:
рис.14
К методике сложения изображений с поворотом через цилиндрические преобразования в WinJUPOS я начал присматриваться еще в конце 2007-го. Именно тогда я задумал эту статью и даже был отснят материал из длинных видеороликов по Марсу. Однако тогда написать статью не удалось, а марсианские ролики были утеряны. Позже стало понятно, что для Юпитера подобная методика будет работать еще эффективнее, но долгое время нам не удавалось отснять более-менее приличный материал из-за низкого положения планеты и отсутствия хорошей атмосферы. Хотя, если признаться честно, пару раз ранее я все же использовал данную технологию по Юпитеру, однако скромно об этом умолчал. С другой стороны, мне требовалось как следует протестировать этот способ съемки и обработки, чтобы понять как это работает. Теперь все мои наработки изложены в виде данной статьи и, я надеюсь, окажутся полезными и для других любителей астрономии. На мой взгляд, прекрасная программа WinJUPOS пока несколько недооценена. И именно поэтому мне интересно про нее писать (ранее уже была статья "Глобус Марса или марсианская глобализация"). В заключение хочу высказать несколько мыслей. Если вы будете использовать метод 3х3, я рекомендую не бояться и подтягивать сложенные стеки вейвлетами или деконволюцией до присутствия некоторого шума, а также делать более короткие стеки, содержащие только самые резкие кадры, т.к. последующее сложение трех изображений в одно работает как хороший шумодав, гораздо более эффективный, чем программные шумодавы. Сколько этого шума должно оставаться на одиночных стеках - это необходимо нащупать в процессе работы. Как говорится, придется набить руку... Следующий момент. Хотя данная методика особенно эффективна для монохромных камер и съемки со светофильтрами, обладатели цветных камер также могут попробовать описанный в статье метод, предварительно разложив изображения на каналы. Думаю, что эффект будет не столь явным, как в случае с монохромной съемкой, однако в некоторых случаях это также сможет помочь... Еще один момент. В WinJUPOS имеется альтернативный способ сложения "с компенсацией поворота" - это разложение изображений в цилиндрические проекции, суммирование этих проекций с последующим "натягиванием" результирующей проекции на модель эллипсоида Юпитера на заданное время. Однако, я решил об этом не писать, т.к. способ этот немного более трудоемкий и не столь изящный... Еще одна вещь, которая не может не обрадовать тех, у кого отсутствует колесо фильтров. Используя методику с поворотом изображений, можно больше не заботиться о потраченном времени на смену фильтра (можно даже спокойно фокус перенавести). Также, разные углы вставленной после смены фильтра камеры легко компенсируются поворотом измерительного круга на стадии измерения изображений... Ну и наконец хочу заметить, что описанная в статье методика применима и к съемке других планет Солнечной системы... На этом собственно и заканчиваю. Успехов!
Ю. Горячко, июль 2010г. |

Все изображения © 2005-2020 Astronominsk | Спонсор хостинга: ObjectStyle LLC, разработчик программного обеспечения.